
"Vorrei essere libero... libero come un uomo!
Come l'uomo più evoluto che si innalza con la propria intelligenza, e che sfida la natura con la forza incontrastata della scienza,
con addosso l'entusiasmo di spaziare senza limiti nel cosmo, è convinto che la forza del pensiero sia la sola libertà."
(Giorgio Gaber).
Research areas
INTELLIGENT COLLABORATIVE ROBOTICS
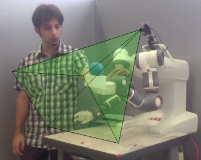
 It is widely agreed that future manufacturing environments will be populated by humans and robots sharing the same workspace. However, the real collaboration can be sporadic, especially in case of assembly tasks which might involve autonomous operations to be executed by either the robot or the human worker.
It is widely agreed that future manufacturing environments will be populated by humans and robots sharing the same workspace. However, the real collaboration can be sporadic, especially in case of assembly tasks which might involve autonomous operations to be executed by either the robot or the human worker.
In this scenario, it might be beneficial to recognised and predict the actions of the human in order to control the robot both safely and efficiently. Apart from safety aspects, one fundamental problem for an effective collaboration is to infer human intentions. Relying on a cognitive algorithm able to predict what the human is about to do can definitely enhance the effectiveness of the collaboration. From one side, the robot would be able to decide not to interfere with humans’ actions, e.g. scheduling a mission which minimises the amount of shared workspace, on the other side the robot would also be able to promptly decide to assist the human, thus implementing a truly collaborative behaviour.
Selected publications:
- A.M. Zanchettin, M. Marconi, C. Ongini, R. Rossi, P. Rocco – "A Formal Control Architecture for Collaborative Robotics Applications", IEEE International Conference on Human-Machine Systems, ICHMS 2020, September 7th - 9th, 2020, online.
- A.M. Zanchettin, A. Casalino, L. Piroddi, P. Rocco – "Prediction of human activity patterns for human-robot collaborative assembly tasks", IEEE Transactions on Industrial Informatics, vol. 15, issue 7, pp. 3934-3942, July 2019.
- A.M. Zanchettin, P. Rocco - "Probabilistic inference of human arm reaching target for effective human-robot collaboration", IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2017, Vancouver (Canada), September 24th - 28th, 2017.
Previous research interests
SENSOR-BASED TRAJECTORY GENERATION FOR SMART HUMAN-ROBOT COLLABORATION
Principal investigator: prof. Paolo Rocco
 Future paradigms in industrial robotics no longer require a physical separation between robotic manipulators
and humans. Moreover, to optimize production, humans and robots will be expected to cooperate to some
extent. In this scenario, involving a shared environment between humans and robots, common industrial
robot controller might turn to be inadequate for this purpose.
Future paradigms in industrial robotics no longer require a physical separation between robotic manipulators
and humans. Moreover, to optimize production, humans and robots will be expected to cooperate to some
extent. In this scenario, involving a shared environment between humans and robots, common industrial
robot controller might turn to be inadequate for this purpose.
In order to obtain a natural and safe collaboration, robots will be equipped with sophisticated sensing devices
and with human-aware control/planning capabilities. In the literature many attempts in developing suitable
robot reactions to unforeseen events have been presented by means of trajectory adaptation or modifications
based on sensor readings. However, in case of very unstructured environments, a better solution might be
achieved with an advanced sensor-based motion and trajectory generation, rather than an online modification
of an offline planned path. The aim of this research is to provide tools to overcome the current limitations in
off-the-shelf robot controller and propose an online trajectory generator capable of understanding the
environment and of computing a sensor-based trajectory to let the robot perform a prescribed task with a
suitable level of safety.
Selected publications:
- A.M. Zanchettin, N.M. Ceriani, P. Rocco, H. Ding and B. Matthias – "Safety in human-robot collaborative manufacturing environments: metrics and control", IEEE Transactions on Automation Science and Engineering, vol. 13, issue 2, pp. 882-893, April 2016.
- R. Rossi, M. Parigi Polverini, A.M. Zanchettin, P. Rocco – "Pre-collision control strategy for human-robot Interaction based on dissipated energy in potential inelastic impacts", IROS 2015, Hamburg (Germany), September 28th – October 2nd, 2015, Best Student Paper Award Finalist.
- A.M. Zanchettin, P. Rocco – "Reactive Motion Planning and Control for Compliant and Constraint-Based Task Execution", IEEE International Conference on Robotics and Automation, ICRA 2015, Seattle (Washington, USA), May 2015, 26th-30th.
HUMAN-FRIENDLY BEHAVIOUR FOR REDUNDANT ROBOTS
Advisor: prof. Paolo Rocco
 Although robustness and safety of industrial robots has been increasing in the last decades, common industrial manipulators are still not able to co-operate with human beings in a natural way.
Although robustness and safety of industrial robots has been increasing in the last decades, common industrial manipulators are still not able to co-operate with human beings in a natural way.
Using redundant manipulators (i.e. robotic arms having more degrees of freedom than those strictly necessary to perform a certain task) it is possible to achieve high levels of dexterity in order to make the robot able to co-operate with humans in the same way that humans would co-operate with other humans. Moreover, since the same task can be performed in several ways, redundant manipulators offer a wide range of flexibility in motion planning. Thanks to the extra degree(s) of freedom, it is possible to modify in real-time the behaviour of the robot, in order to ensure a safe co-operation with human co-workers and minimize the injury risk, without modifying the end-effector motion.
The aim of this research is to study the problem of kinematic inversion for redundant manipulators in order to make their motion as natural as possible.
Since the robot is supposed to co-operate with humans, its motion should be predictable, safe, and intuitive. This work is focused on the development of some criteria to design a human-like kinematic inversion algorithm for redundant manipulators while maintaining the possibility of on-line adjustments of the joint trajectory to perform additional tasks such as obstacle avoidance, injury risk minimization, etc. In this way, a human-friendly behaviour of the robot will ensure a natural co-operation between robotic manipulators and humans which is not obtained with today commercial industrial manipulators.
Selected publications:
- A.M. Zanchettin, L. Bascetta, P. Rocco - "Achieving Humanlike Motion: Resolving Redundancy for Anthropomorphic Industrial Manipulators", IEEE Robotics and Automation Magazine, volume 20, issue 4, pp. 131-138, December 2013, I-RAS Young Author Best Paper Award 2014.
- A.M. Zanchettin, L. Bascetta, P. Rocco - "Acceptability of robotic manipulators in shared working environments through human-like redundancy resolution", Applied Ergonomics, volume 44, issue 6, pp. 982–989, November 2013.
- A.M. Zanchettin, P. Rocco - "A general user-oriented framework for holonomic redundancy resolution in robotic manipulators using task augmentation", IEEE Transactions on Robotics, volume 28, issue 2, pp. 514-521, April 2012.
OPTIMISATION-BASED DESIGN FOR LINEAR CONTROL SYSTEMS
Advisor: prof. Marco Lovera
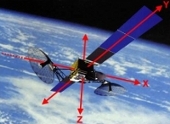 Optimisation-based design is a very active research area aiming at the development of computationally efficient methods for the solution of challenging control issues (e.g., static output feedback) in terms of constrained optimisation problems. Among others, randomised methods and nonsmooth optimisation techniques appear today as the most promising paths to the development of viable design methods applicable to practical engineering problems. To this purpose, the proposed research aims at the following objectives: to provide an overview of optimisation-based design methods, to explore potential integrations between them and to eventually assess their applicability to a real control system design problem such as attitude stabilisation for magnetically actuated satellites.
Optimisation-based design is a very active research area aiming at the development of computationally efficient methods for the solution of challenging control issues (e.g., static output feedback) in terms of constrained optimisation problems. Among others, randomised methods and nonsmooth optimisation techniques appear today as the most promising paths to the development of viable design methods applicable to practical engineering problems. To this purpose, the proposed research aims at the following objectives: to provide an overview of optimisation-based design methods, to explore potential integrations between them and to eventually assess their applicability to a real control system design problem such as attitude stabilisation for magnetically actuated satellites.
Selected publications:
- A.M. Zanchettin, A. Calloni, M. Lovera - "Robust magnetic attitude control of satellites", ASME/IEEE Transactions on Mechatronics, volume 18, issue 4, pp. 1259-1268, August 2013.
- A. Calloni, A. Corti, A.M. Zanchettin, M. Lovera - "Robust attitude control of spacecraft with magnetic actuators", American Control Conference, ACC 2012, Montreal (Canada), June 2012, 27th-29th, invited paper.
- A.M. Zanchettin, M. Lovera - "H_infty attitude control of magnetically actuated satellites", 18th IFAC World Congress, Milano (Italy), August/September 2011, 28th-2nd.